| .: Home :. | .: Productions :. | .: Misc :. |
Pédale Vite
De ton frigo
Tu dis « zut » à tes parents
Et tu pécho ton vélo
Pédale vite
Pédale vite

Maintenant en version 2 !
Présentation
Pédale Vite est un pédalier d’effet à construire soi-même (Do It Yourself). Cette page en contient les plans de réalisation. Dans un premier temps j’y ai fait figurer mes essais, démonstrateurs et prototypes, les galères, les résultats, les succès et les échecs. À présent le projet est relativement abouti, et les plans sont accessibles librement un peu plus bas.
Note : j’ai ouvert un fil de discussion sur les forums d’Audiofanzine, au cas où des personnes auraient envie de lancer des commentaires sarcastiques ou peut-être même constructifs sur ce projet.
Vidéo de présentation pour Pédale Vite v1, 19 min, 122 Mo, en français avec sous-titres anglais.
Cahier des charges

Vite fait :
- Multi-effet avec au minimum le lot habituel : disto, chorus, flanger, écho, réverb…
- Programmes contenant des combinaisons libres des effets
- Action des programmes par interrupteurs au pied, une douzaine devrait faire l’affaire
- Transition rapide et fluide entre les programmes
- Pédale d’expression pour effets type wha, volume…
- Suffisamment robuste pour la scène et le transport régulier
- Accordeur silencieux activable au pied
- Autonome, pas besoin d’ordinateur externe lors de l’utilisation
- Évolutif, possibilité d’ajouter ses propres effets
- Alimentation sur secteur avec interrupteur
- Contruction simple, reproductible et adaptable par une personne bricoleuse sans plus
Je ne me suis pas mis d’objectif de budget. J’ai essayé de ne pas trop faire exploser les coûts sans sacrifier la qualité pour autant. J’ai dû y mettre dans les 500 €, mais en faisant divers essais qui n’ont pas forcément été intégrés dans la version finale, et sans chercher systématiquement les fournisseurs les moins chers. De toute façon c’est un projet cool pour s’amuser, je ne va pas essayer de rivaliser avec l’industrie du capitalisme. Je pourrai éventuellement optimiser les coûts par la suite, quand tout sera au point et que j’aurai un peu de recul et des retours.
En terme de fonctionnalités actuelles ou potentielles, on doit se trouver à peu près sur la ligne d’un Pod HD X.
Améliorations principales de la version 2 :
- Carte audio maison
- 2 canaux d’entrée symétriques
- Connecteurs XLR et jack en combo
- Préampli micro (INA103) débrayable pour les entrées XLR
- Gain de +20 dB ou +40 dB au choix sur le préampli mircro
- Gain réglable avant ADC entre 0 et +40 dB
- Impédance ligne/instrument : > 2 MΩ
- Impédance du préampli micro : 2,2 kΩ
- Niveau de bruit : −102 dBFS RMS (sans pondération) à un gain de 0 dB
- Diaphonie entre les canaux : −72 dB (sans pondération)
- 2 canaux de sortie symétriques
- Codec Cirrus Logic CS4272
- Pilote maison offrant une latence audio décente, aller-retour à
44,1 kHz:
1,12 ms (buffers de 4 samples),
1,72 ms (buffers de 16 samples),
3,84 ms (buffers de 64 samples)
- 2 canaux d’entrée symétriques
- Boîtier nettement plus fin
- Écran plus grand et plus haute résolution
- Processeur interne plus puissant (RPi4)
Ressources
Tous les documents nécessaires ainsi que le code source se trouvent à présent sur un dépôt GitLab. Par soucis pratique, les instructions de montage et le manuel d’utilisation sont également consultable en ligne ci-dessous.
Le projet n’est pas figé, je continue à le mettre à jour quasi-quotidiennement, au moins pour la partie software. Si cela vous intéresse, n’hésitez pas à repasser de temps en temps sur cette page ou sur le dépôt pour consulter les avancées.
D’autre part si des personnes ont envie de se lancer dans l’aventure et de monter leur pédalier sur ce modèle, qu’elles se signalent. Ça nous permettra de faire des commandes groupées de matériel et pourquoi pas de concevoir et sortir des PCB s’il y a une demande. On pourra aussi organiser des ateliers d’entraide au montage.
Cette page constitue la partie plus ou moins bloguesque décrivant mes avancées dans ce projet, essentiellement à propos de la version 1.
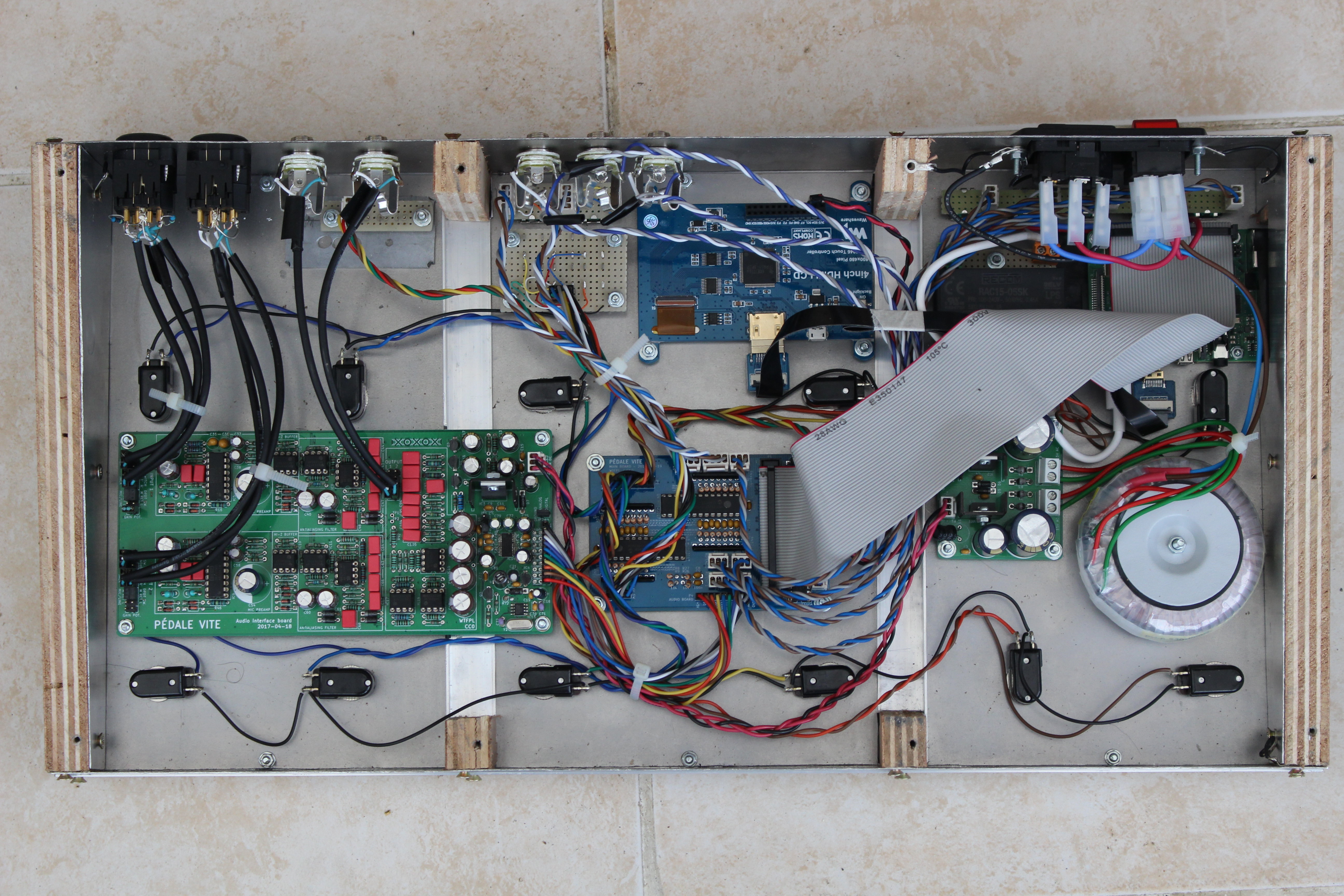
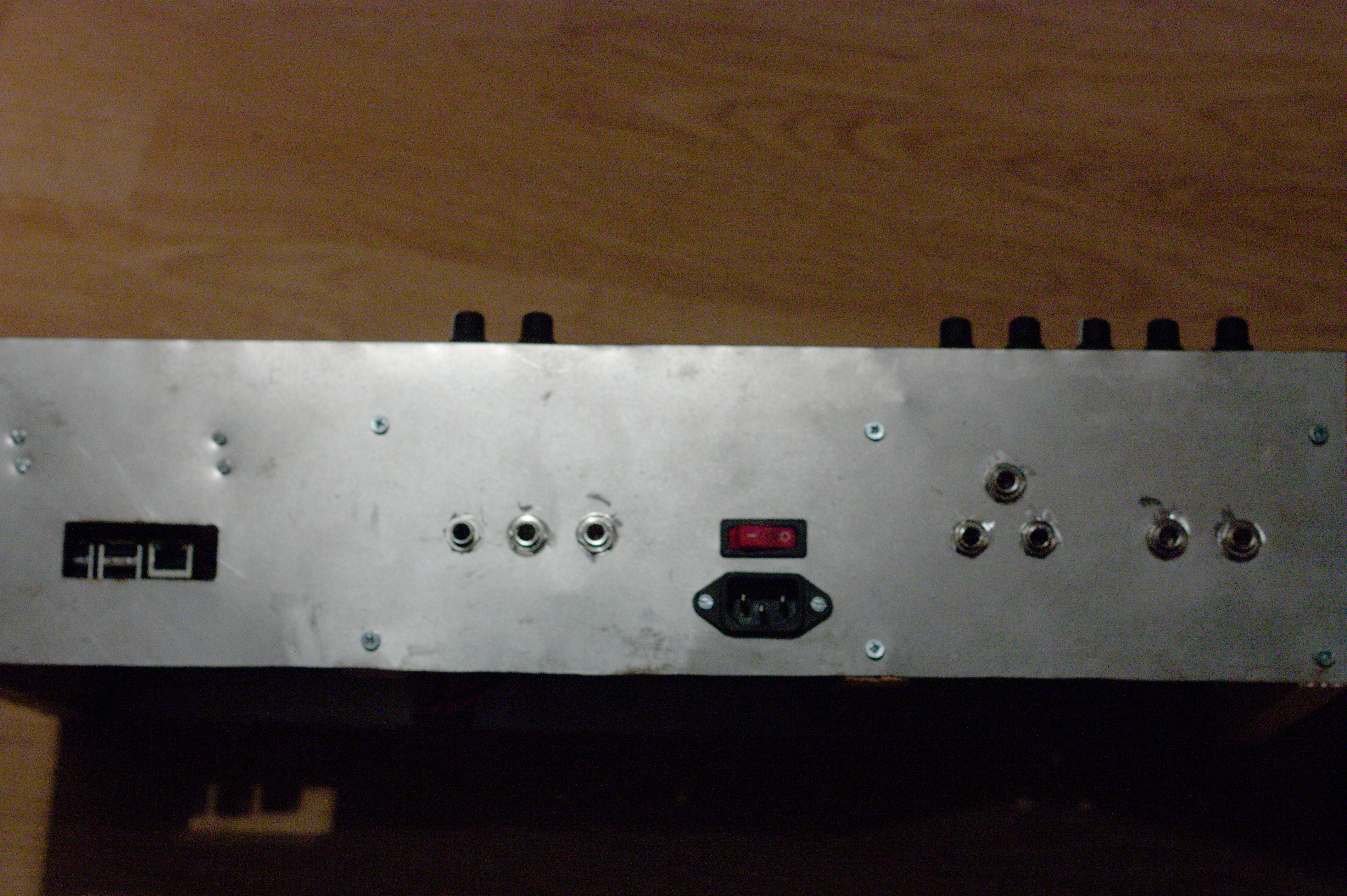
Photos
Version 2

Version 1


Exemples audio
Sans ordre particulier ni commentaire pour l’instant :
Sons enregistrés le 2019-11-06 avec :
- Canal de gauche : Marshall 8080 Valvestate 80V
- Canal de droite : Fender Hotrod Deluxe
- Microphones : Sennheiser e906
- Préamp et numérisation : Yamaha 01V96i
Sans traitement particulier à part de la découpe et des fondus. Sound of the Void (guitare) ou Cass&Tord (basse) donnent des exemples d’utilisation dans des morceaux complets.
| [Home] [Productions] [Misc] | Website by Laurent de Soras, 2003–2023 |